🚀 太空基地 AI 保险箱教学设计
一、教学目标
- 理解 人脸识别(Face Recognition)在真实安全系统中的应用
(门禁系统、保险箱、实验室权限管理、航天基地) - 掌握 AI视觉传感器的人脸识别能力,理解“身份”概念
- 学会 将 AI识别结果 → 安全规则 → 电机行为 进行系统设计
- 理解 失败次数、风险升级、双人认证等安全策略思想
- 培养 系统建模与安全思维
- 身份 ≠ 权限
- 风险越高,验证越严格
二、教学准备
1️⃣ 硬件
- 乐高 SPIKE / EV3 主机 × 1
- 中型电机 × 1
- 用于保险箱旋转解码 / 开门(如 D 口)
- AI 视觉传感器 × 1
- 用于人脸识别(Face 模式)
- 乐高积木搭建的保险箱结构
- 带“门”或“旋转解码盘”
- 门可通过电机打开或解锁
- Hub 屏幕
- 用于显示提示信息(认证状态)
2️⃣ 软件
- LEGO SPIKE / EV3 编程环境
- AI视觉传感器支持人脸识别模式
3️⃣ 教学物料
学生角色扮演或使用图片演示
 舰长
舰长 宇航员
宇航员 游客
游客
三、教学流程
1️⃣ 导入(5 分钟)
情境引导(故事设定)
- 太空基地中存放机密任务文件的保险箱
- 平时舰长或宇航员任意一人可开
- 连续失败触发高风险 → 必须双人认证
提问引导
- 为什么不是任何人都能打开?
- 如果有人一直尝试,会不会危险?
- 现实银行或实验室如何处理?
引出主题
- 今天我们要做一个 会升级安全等级的 AI 保险箱
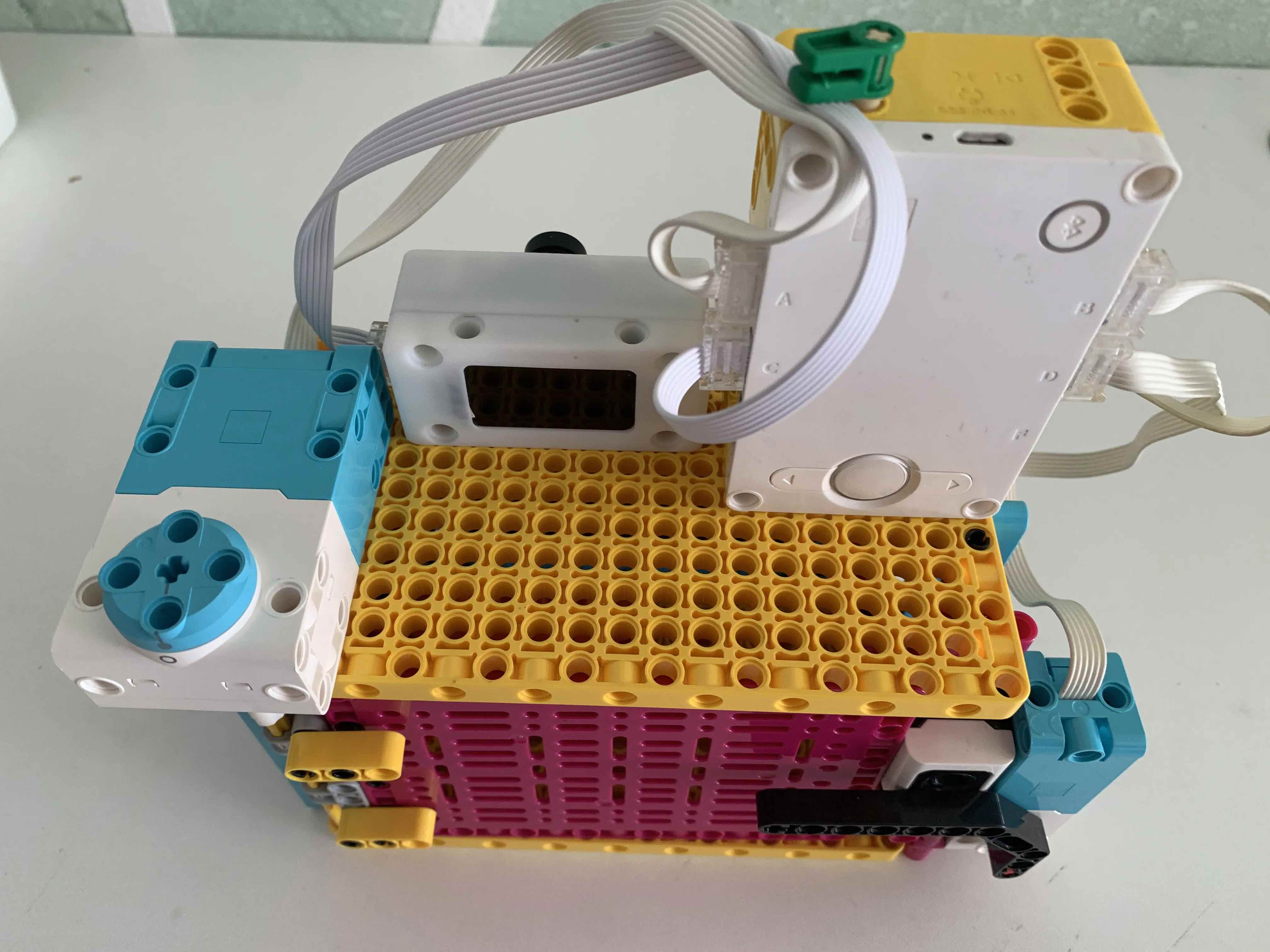
2️⃣ 搭建(10–15 分钟)
结构说明
- 参考乐高官方保险箱或旋转解码结构
- 一个电机负责:
- 转动解码盘
- 或直接控制门开/关
强调
- 机械结构不是重点
- 重点是 谁来决定什么时候转
3️⃣ 编程(25 分钟)
(一)核心系统规则说明(先讲逻辑)
基础规则(正常模式)
- 舰长 OR 宇航员 → 任意一个人脸识别成功 → 保险箱打开
风险升级规则
- 连续 3 次识别失败 → 系统进入 高风险模式
- 之后必须 双人认证 才能开门
(二)人脸识别逻辑设计
- AI 视觉传感器在 Face 模式下返回示例:
| 返回值 | 说明 |
|---|---|
| 0 | 未识别(默认) |
| 1 | 舰长 |
| 2 | 宇航员 |
| 3 | 陌生人 |
(三)单人脸开门(第一阶段)
程序思路
- 如果识别到 = 舰长 OR 宇航员
- 并且 当前模式 = 正常
- → 电机转到开门角度
- → 失败次数清零
教学点
- 一个 if 判断
- OR 逻辑
- AI 结果 → 电机动作
(四)失败计数与模式切换(关键教学点)
变量
- 失败次数(
fail_count) - 当前模式(
normal / high_risk)
- 失败次数(
逻辑
- 识别失败 →
fail_count + 1 - 如果
fail_count ≥ 3→ 模式 = 高风险
- 识别失败 →
📌 强调
- AI 不只是识别
- 系统会 记住过去发生的事
(五)双人脸认证(进阶规则)
双人认证逻辑
- 模式 = 高风险 → 不允许单人开门
- 认证流程:
- 第一个人脸通过
- 必须是舰长或宇航员
- Hub 显示:“第一人认证成功,请第二人”
- 第二个人脸通过
- 与第一个人不同
- 两人都合法 → 允许开门
- 第一个人脸通过
Hub 屏幕提示示例
- “高风险模式”
- “已验证 1/2”
- “双人认证成功,正在解锁”
Spike 示例代码

RobotCode 示例代码
首先,需要设置人脸模版,设置如下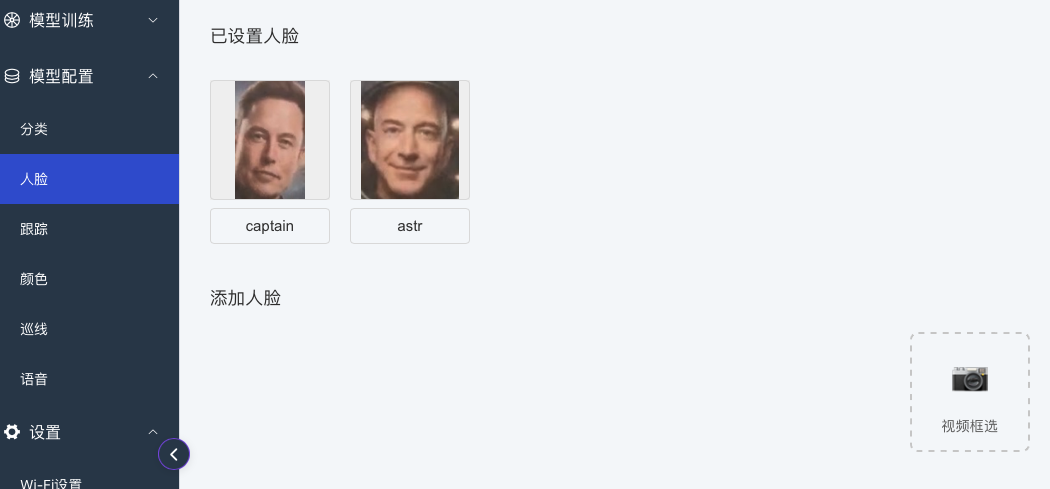 然后才是编程
然后才是编程
四、演示与测试(10 分钟)
学生分组体验
正常情况下
- 舰长 → 开
- 宇航员 → 开
故意制造失败
- 陌生人多次尝试
触发高风险模式后
- 单人 → 不开
- 两人依次 → 开
观察点
- 系统是否会“升级规则”
- Hub 屏幕提示是否清晰
- 电机动作是否符合预期
五、拓展思考(10 分钟)
- 如果两人必须在 10 秒内完成认证 → 时间窗口
- 如果第二个人一直不来 → 状态清空
- 如果失败次数继续增加 → 触发警报 / 锁死系统
六、教学总结
学生理解了
- 人脸识别 ≠ 开门按钮
- AI 可以参与安全决策
学生掌握了
- 人脸识别基本用法
- 失败计数与状态切换
- 单人认证 vs 双人认证逻辑
学生体验到了
- 🚀 一个真正像太空基地安全系统的 AI 保险箱