欢迎使用 AIVision Lite
产品介绍
AI Vision Sensor 是一款面向 LEGO 教育与创客 的智能视觉传感器,内置 9 大 AI 模型,支持:
- 物体检测(80种类)
- 高级分类(返回坐标)
- 人脸识别
- 文字与数字识别
- 姿态检测
- 二维码 / 条形码
- 颜色识别
- 物体追踪
- 巡线
它不仅可通过 Scratch 编程界面让孩子们从小学起轻松上手,还能无缝对接 LEGO Spike、EV3、Arduino、micro:bit 等主流控制器,轻松融入创客与教育场景,做到软硬件结合,寓教于乐。
技术规格
| 参数 | 说明 |
|---|---|
| 处理器 | RV1106G3,1.2GHz 1TOPS NPU算力 |
| BLE&WiFi | ESP32-C3 |
| 摄像头 | 300W,低光照摄像头,焦距可调节 |
| 供电电压 | 5.0V |
| 电流消耗 | 峰值约 300mA @ 5.0V; 关闭wifi,峰值约200mA @ 5.0V |
| 连接接口 | SPIKE, EV3, UART, I2C, GPIO |
| 内置功能 | 物体检测 / 分类 / 文字数字识别 / 人脸检测 / 目标跟踪 / 姿态检测 / 二维码&条码 / 颜色检测 / 巡线 |
| 尺寸 | 66mm × 29.5mm |
| 电池 | 3.7V 锂电池,1800mAh,续航约 4 小时(电池版支持) |
电源供电
不带电池版本
- USB供电
- 接口供电
- 两者可并行供电
电池版本
- USB供电:USB 供电时会自动充电; 充电时,rgb灯变红色,充满时变绿色
- 接口供电:参考接口说明章节引脚num,其中3和5脚都可供电
- 电池供电:插入 LEGO 主机时,电池自动供电,可在软件中设置优先模式
- 多方式并行:支持 USB + 接口 + 电池同时接入
⚠️ 注意
- 请保证电源电压与功率足够,否则可能导致设备异常。
- 电池供电优先选择,目前只会切换接口引脚3的供电,引脚5的供电无法切换
连接使用(两种方式连接设备)
方式一、TypeC设备连接(固件版本 >= 1.0.8)
- 使用typec线连接电脑,typec线必须是可以传输数据的,一端连接AI主控,一端连接电脑。
- chrome(最好是chrome)浏览器打开console.robot-code.com网址(第一次加载有点慢),点击红色
 按钮,弹出框,选择这个
按钮,弹出框,选择这个 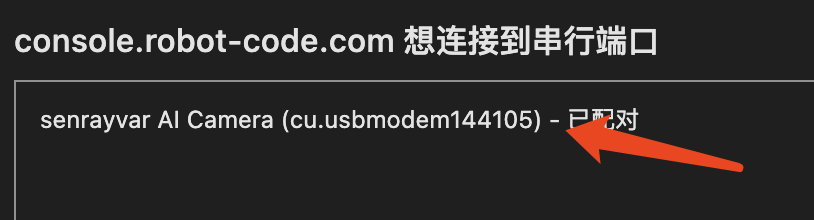 ,windows电脑显示COMx。
,windows电脑显示COMx。 - 点击弹框的连接按钮,按钮变成绿色表示连接成功, 其他情况根据提示进行操作。
- 连接上设备后,点击左侧菜单设置->高级设置, 查看分辨率,如果分辨率和电脑系统对的上,则进行第5步,否则继续第4步,根据电脑系统选择分辨率,window选择后缀带win的分辨率,mac选择后缀带mac的分辨率,选择完,点击下方 确认 按钮后, 系统会重新启动。
- 点击右侧视频按钮, 右上角应该可以看到有视频出来,点击Live 右边的 刷新按钮也可以
方式二、APP设备连接
- 官网下载app, 如遇到安装问题,请看本页最后一章节REQ app安装问题,如果都试了,那可能系统不兼容,建议尝试其他设备连接

- 打开app后,点击红色蓝牙按钮 → 扫描设备, 会弹出设备,默认名称
senrayvar字样 - 输入密码(默认
000000) → 成功后按钮变绿 (再次点击绿色按钮即可断开) - 【连接wifi,显示视频】连接上设备后,点击左侧菜单 设置->Wi-Fi设置,普通模式表示设备连接到路由器,电脑也是连接到同一路由器;热点模式表示设置自己当路由器发射无线信号,电脑连接设备充当的路由器。两种模式都可以切换试试。请记住切换完一定要重启,否则不稳定
- 设备开通wifi后,可以在 设置->设备信息 里面查看 设备IP地址 和 本机IP地址,看是否是同一网段,只有在同一网段视频才能显示
- 点击右侧视频按钮,点击右上角刷新按钮 应该可以看到有视频出来, 如果视频一段时间没有出来,可以依次排查 a. wifi必须是2.4G b. 重看第5步,看是否同一网段 c. 使用热点模式。
修改设备名称

修改后需等待 约 3 小时, 操作系统缓存刷新后才生效。
TIP
建议首次连接后立即修改设备名称,方便区分。
接口说明
LEGO Spike(45678) / 51515/ EV3
- Spike&51515:作为超声波传感器方式接入,目前SPIKE支持的功能,51515都支持
- EV3:插入 1/2/3/4 输入端口
UART
| 引脚 | 功能 |
|---|---|
| 1 | TX(发送) |
| 2 | RX(接收) |
| 3 | VCC(电平供电,3.3V 或 5V) |
| 4 | GND |
| 5 | 5V 电源输入(若 3 脚为 5V 可不接) |
| 6 | NC 不接 |
I2C
| 引脚 | 功能 |
|---|---|
| 1 | SDA(数据) |
| 2 | SCL(时钟) |
| 3 | VCC(电平供电,3.3V 或 5V) |
| 4 | GND |
| 5 | 5V 电源输入(若 3 脚为 5V 可不接) |
| 6 | NC 不接 |
GPIO
| 引脚 | 功能 |
|---|---|
| 1 | IO口(可设置高低电平,高电平电压和3引脚一致) |
| 2 | IO口(可设置高低电平,高电平电压和3引脚一致) |
| 3 | VCC(电平供电,3.3V 或 5V) |
| 4 | GND |
| 5 | 5V 电源输入(若 3 脚为 5V 可不接) |
| 6 | NC 不接 |
⚠️ 注意
引脚3需要根据外接的TTL电平来确定,如果外接UART或I2C接口TTL电平是3.3V,那么就接3.3V,如果外接TTL电平时5V,那么就接5V。 当接入是5V时,也可以给系统供电,所以5引脚可以不接;否则必须在5脚接入5V
参考图,如下图放置时,由上到下分别时1,2,3,4,5,6引脚 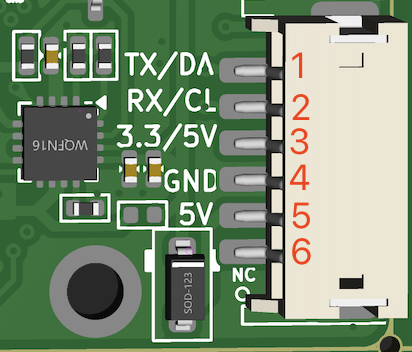
模型市场
支持云端模型训练, 训练完成后的模型再上传到设备使用。 目前已开放部分检测模型
模型配置
分类(高级分类)
- 上传图片/视频并框选物体,命名后即可识别
- 返回坐标(部分分类识别不了位置,X1,Y1返回
(0,0)) - 最大支持 10 类
📝 与检测的区别是:
- 检测目前只支持80种类别,并且同一类别的不同形态的物体会检测到同一类型,比如杯子,不同的杯子检测的结果都是杯子,而高级分类可以分别上传不同的杯子进行配置,从而检测到不同的杯子。
- 如果需要检测80种以外的物体,检测需要进行云端训练才能识别,高级分类直接上传图片配置即可。
- 检测优点也很明显,经过训练的模型对特定物体的检测即精准又高效。
人脸
- 支持上传 / 框选方式配置
- 可修改名称
- 最大支持 10 张
跟踪
- 仅支持 1 个目标, 最多上传5张照片,分别对应一个目标的不同方向,名称需要保持一致
颜色
- 系统内置:红、橙、黄、绿、青、蓝、紫
- 可自定义纯色目标,如果有设置自定义颜色,那么系统的颜色将不生效。
- 最大支持 10 种
巡线
- 仅支持黑色线条
语音(PRO版本支持)
- 使用自定义模式时需要录制, 录制命令词,并修改名称,以供代码中使用
Wi-Fi 设置
- 路由器模式:连接 2.4G Wi-Fi,与 PC 端同网段
- AP 模式:设备热点,名称与设备名一致,PC连接热点后,将无法连网
⚠️ 建议
首次连接wifi或切换wifi后,建议断电重启一次以保障wifi稳定连接
优先使用路由器模式,AP 模式仅在信号弱时使用。
高级设置
- 接口协议:支持 spike、ev3、uart、i2c。 使用方法参考Lego使用、UART&I2C使用、GPIO使用
- 供电模式(电池版):优先外部 / 优先电池,电源切换设备运行不会中断
- RGB灯亮度:调节亮度(0-100),设置为0时,关闭rgb灯
- 开启照明灯:RGB灯作为照明灯使用。设备重启后,设置失效
- 蓝牙密码:六位数字,默认
000000 - 分辨率:800×480 / 1072×640
- 恢复出厂设置:清空所有配置与所有的模型配置
设备信息
展示 App 版本、固件版本、MAC 地址 等信息。
最下方可选择新版本并点击 升级 按钮进行 OTA 升级。
忘记密码
当忘记蓝牙连接密码时,使用此功能进行密码重置。
根据 App 提示进行操作,重置成功后,密码恢复为000000
编程界面
右键点击(平板长按)
code1,弹出对话框,包括:新建、复制、重命名、删除。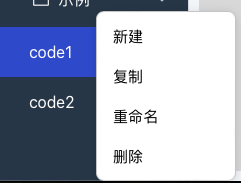
界面布局说明
- 右上方:显示视频
- 右下方:显示日志
- 显示区域可通过拖动分界条调整大小
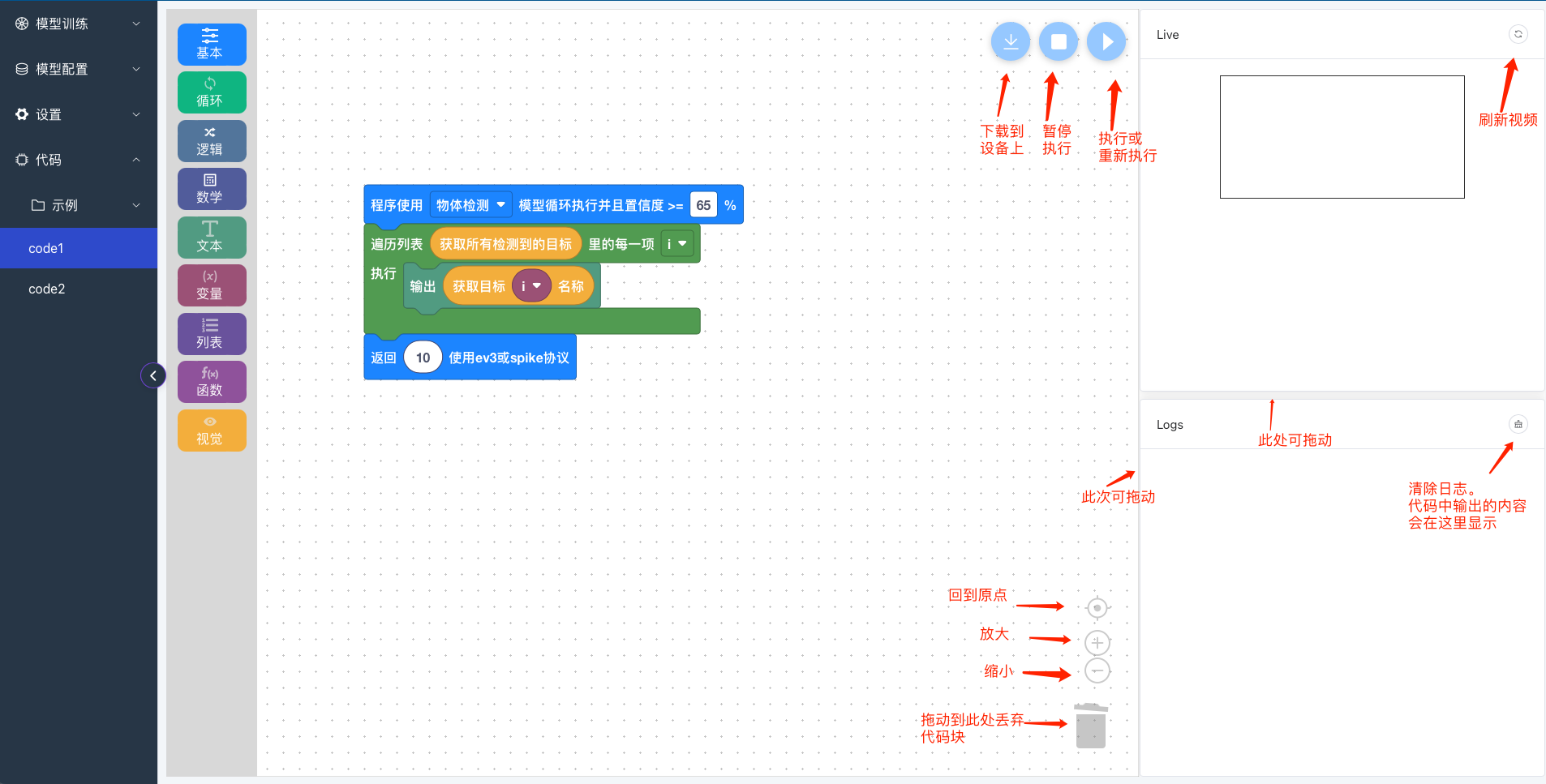
⚠️ 注意
如果有不用的代码块,请全部删除,否则不能提交!
显示日志有限流,并不是每帧数据都打印,
字节数 [0, 50] 10次/s, 字节数 [50, 100] 5次/s, 字节数 [100, 500] 2次/s, 字节数 [500, 1000] 1次/s。超过1000截断,只打印前1000个字符
其他功能
远程遥控
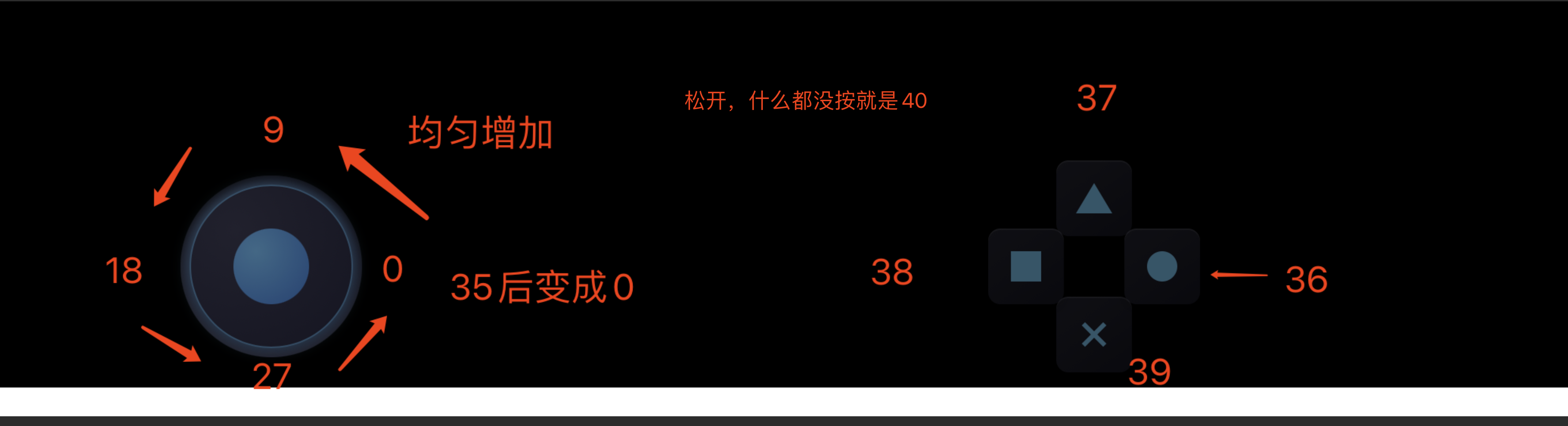 接收器按照上面的数字来接受并进行处理
接收器按照上面的数字来接受并进行处理
代码导入导出
- 可选择 导入/导出代码
- 保存文件格式:
.bin - 一般情况下导出到下载文件夹
语言切换
目前支持 中文 / English
编程块使用
基本(Basic)
一些最常用的基础积木。
程序使用指定模型循环执行...
- 用法:程序必须以此积木开始,并指定一种模型类别和对应的置信度。
设置模型类别和置信度
- 用法:在程序运行过程中,可以动态修改模型类别和置信度。
等待
- 用法:让程序进入睡眠状态。
⚠️ 注意
不要等待太久,以免程序一直处于 sleep 状态,导致无法执行其他操作。
接收到的命令
- 用法:
- SPIKE 在使用超声波时,可通过灯的形状来通知 AI Vision,AI Vision 通过此积木接收命令,实现由主机控制。
- EV3 接口无此功能。
- UART/I2C 也可通过发送命令实现类似效果。
EV3 & SPIKE 接口返回数据
- 用法:当协议为 EV3 或 SPIKE 时,请使用此积木进行返回。
⚠️ 注意
- 同步返回数值必须在 0–200 之间
- 当程序执行到这行指令后会立即返回,即不执行其他指令了。
- 建议在所有可能返回的分支返回数据。
UART & I2C 接口返回数据
用法:当协议为 UART 或 I2C 时,请使用此积木进行返回。
- 如果输入是 字符串,请使用
none转换:
- 如果输入是 object,请使用
json转换:
- 如果输入是 字符串,请使用
⚠️ 注意
当程序执行到这行指令后,会返回,也就是不执行其他指令了。建议在所有可能返回的分支返回数据。
视觉类(Vision)
与视觉检测、识别相关的积木。
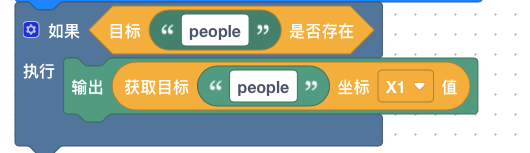
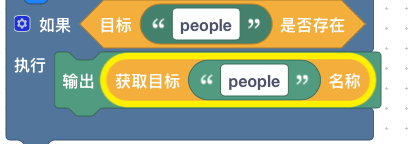
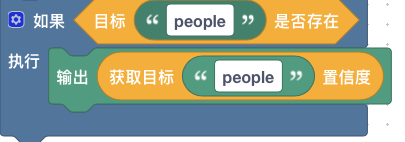
指定的目标是否存在
- 用法:判断一个指定名称的目标是否存在。存在返回 真,否则返回 假。
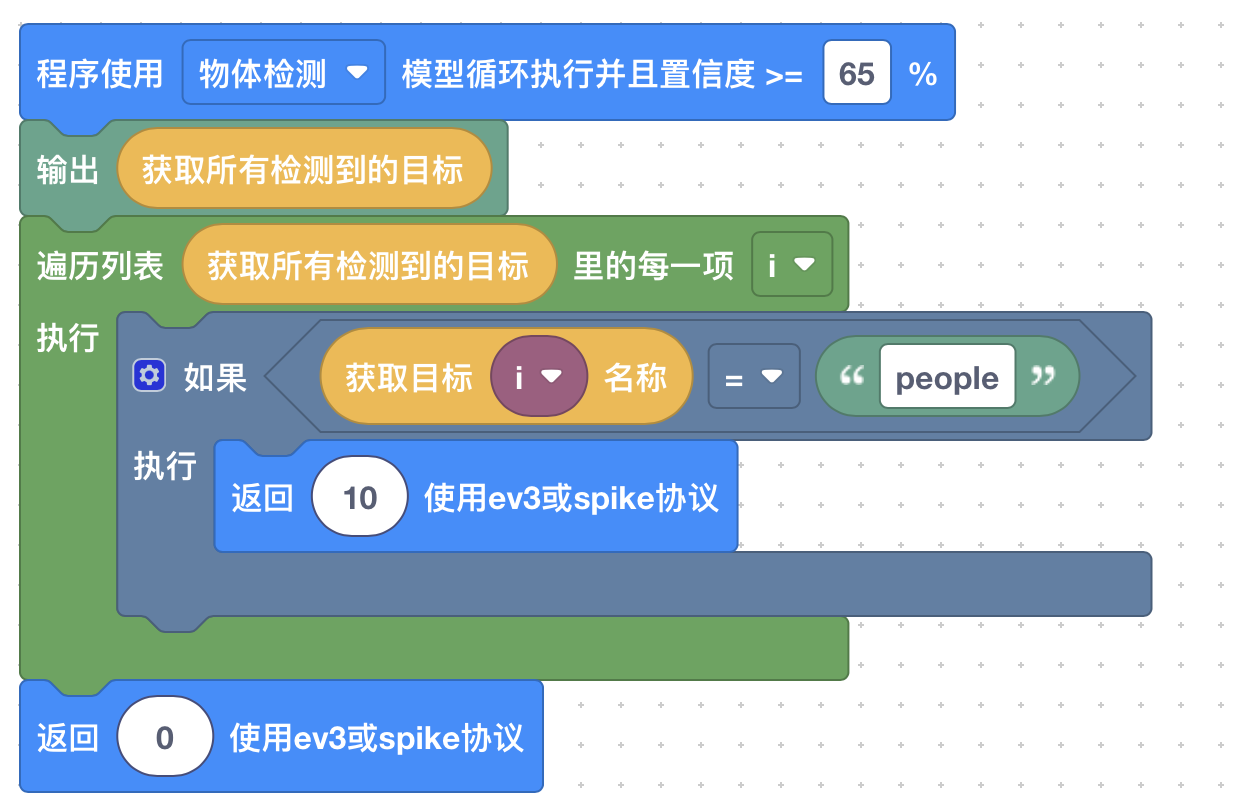
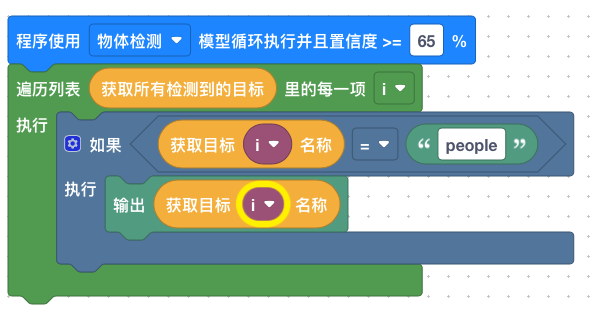
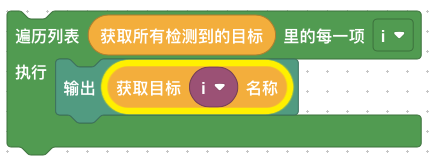
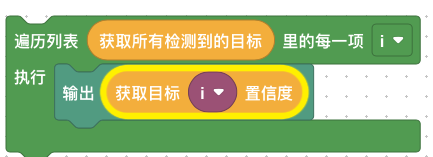
获取所有检测到的目标
用法:返回所有检测到的目标(list 列表),需循环遍历获取单个目标。
示例:
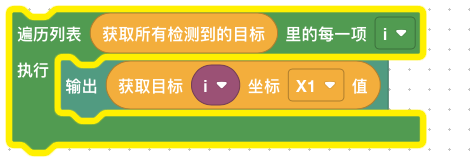
获取指定目标的坐标值
用法:输入目标名称或 object,返回目标矩形框的坐标值。
- 坐标值以图像左上角 (0,0) 为原点。
- 例如分辨率为 800×480,则右下角坐标为 (799,479)。
坐标说明:
- X1:矩形框左上角的 X 坐标
- Y1:矩形框左上角的 Y 坐标
- X2:矩形框右下角的 X 坐标
- Y2:矩形框右下角的 Y 坐标
用法示例:
- 使用目标名称
⚠️ 注意
如有多个同名目标,仅返回第一个
- 使用目标 object
获取指定目标的姿态位置的坐标值
用法:输入目标名称或 object,返回姿态点坐标(仅对姿态模型有效)。
- X:位置点的 X 坐标
- Y:位置点的 Y 坐标
示例:

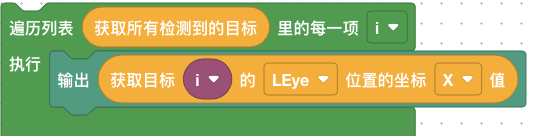
支持的姿态点:
Nose(鼻子)、LEye(左眼)、REye(右眼)、LEar(左耳)、REar(右耳)、
LShoulder(左肩)、RShoulder(右肩)、LElbow(左肘)、RElbow(右肘)、
LWrist(左手腕)、RWrist(右手腕)、LHip(左臀)、RHip(右臀)、
LKnee(左膝)、RKnee(右膝)
获取指定目标的名称
用法:输入目标名称或 object,返回目标名称(可能是模型默认或自定义配置)。
示例:
获取指定目标的置信度
用法:输入目标名称或 object,返回匹配目标的置信度(0–1 之间的小数,1 为最大)。
示例:
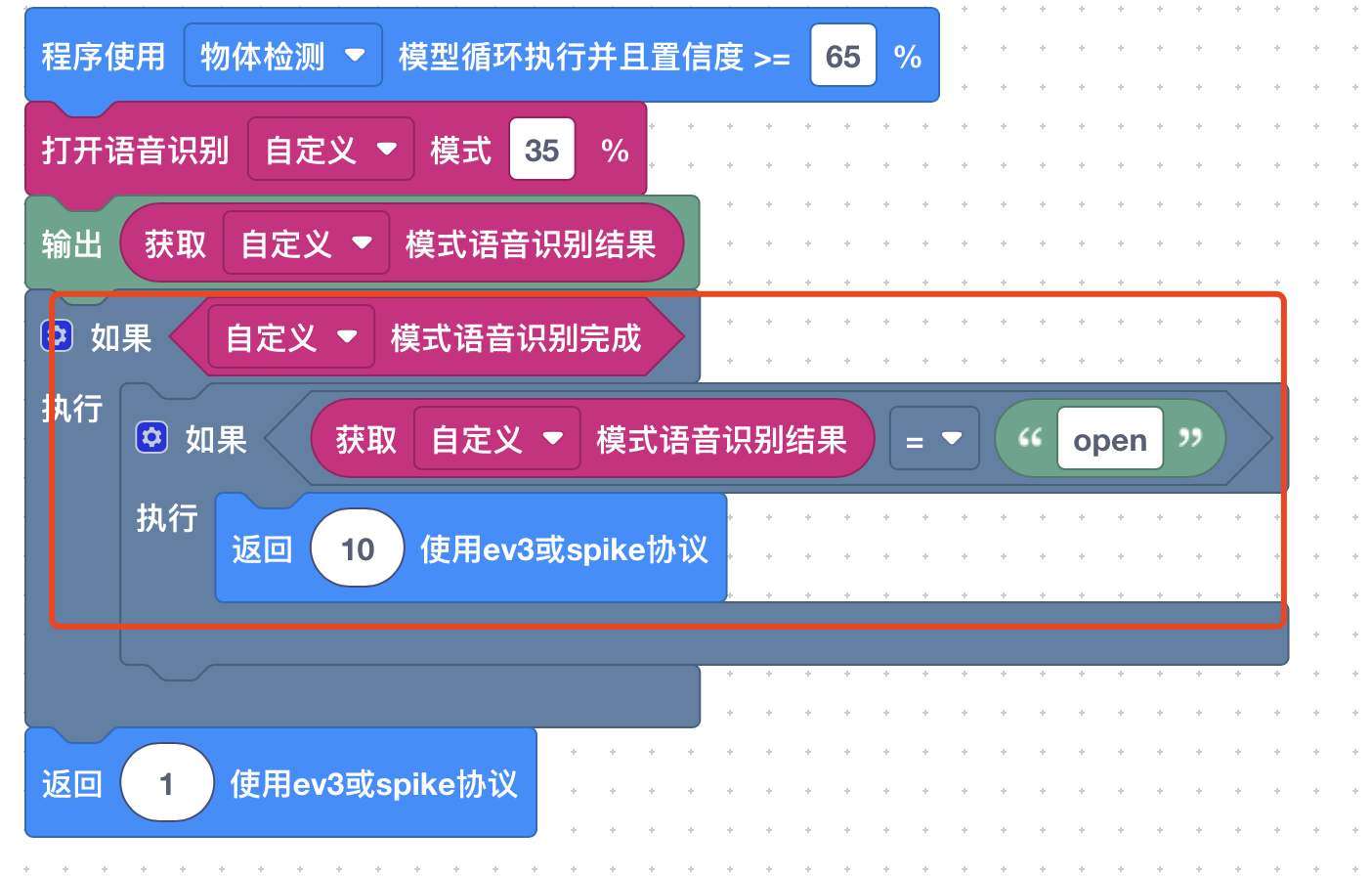
语音(Voice)(PRO版本支持)
与语音识别相关的积木。
打开语音识别开关
- 用法: 打开语音识别, 使用语音识别前,必须使用这条命令。如果使用自定义模式,需要设置置信度
获取语音识别结果
- 用法:获取语音识别的结果,需要与打开语音识别的模式相同, 如果是自定义模式 返回语音模型配置的名称,如果是自动模式,返回语音识别到的结果
语音识别是否完成
- 用法:返回是和否,由于语音识别是异步方式进行,识别完了才能获取到结果,可以使用此命令来判断是否识别完成
获取语音识别置信度
- 用法:获取语音识别的置信度,自动模式下始终为1, 自定义模式下, 可以根据打印出的置信度结果调整 “打开语音识别开关” 这条命令中的置信度
其他类
打开APP参考使用说明
Lego 使用
用于 SPIKE 与 EV3 的应用场景。
前置条件:必须在高级设置中选择接口协议为SPIKE或者EV3
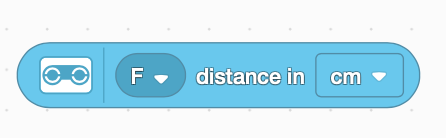
SPIKE 应用:获取 AI Vision 数据(单位必须为 cm)
SPIKE 应用:发送命令给 AI Vision
(如需查看接收值,可在 AI Vision 中使用输出命令打印)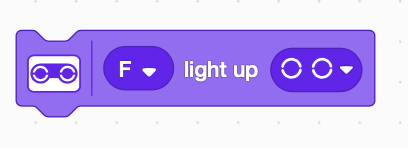
EV3 classroom 应用:
- 输入端口必须是 1, 2, 3, 4
- 单位必须为 cm

pybricks 应用:
- 单位必须为 cm
代码示例:
- 单位必须为 cm
from pybricks.hubs import PrimeHub
from pybricks.pupdevices import Motor, ColorSensor, UltrasonicSensor, ForceSensor
from pybricks.parameters import Button, Color, Direction, Port, Side, Stop
from pybricks.robotics import DriveBase
from pybricks.tools import wait, StopWatch
hub = PrimeHub()
dist_sensor = UltrasonicSensor(Port.A)
distance_mm = dist_sensor.distance()
# convert to cm
distance_cm = distance_mm / 10
print("value:", distance_cm, "cm")⚠️ 注意
LEGO 获取传感器数据的时候,总是会获取到最近一次收到的数据。例如如果有一帧数据发送了数据10,后面几帧数据都没有发送return数据,那么读取的数据会一直是10,直到下一次收到数据。所以在没有处理到数据的时候建议也发送return数据,以做区分
UART
前置条件:必须在高级设置中选择接口协议为uart
您可以从以下渠道获取 SDK 的源代码:
- Gitee: warrenbas / senrayvar (推荐中国大陆用户使用)
- GitHub: warrenBas / AIVisionSDK
Scratch Mind+
前置条件:必须在高级设置中选择接口协议为uart
您可以从以下渠道获取插件:
- Gitee: warrenbas / mind_plus_ext_senrayvar_aivision
- mixly & makecode 插件开发中,如有合作需求,欢迎联系我们
I2C 使用
前置条件:必须在高级设置中选择接口协议为i2c
接收协议
// Byte[0] = 0x88, Byte[1] = 0xEE
// Byte[2-3] = 数据长度 (uint16, 小端),len = Byte[2] | Byte[3] << 8
// Byte[4..] = 数据内容,长度为len
// Byte[4+len] = CRC 校验数据,也就是Byte[4]开始,长度为len
uint8_t calc_crc(const uint8_t *data, size_t len) {
uint8_t crc = 0;
for (size_t i = 0; i < len; ++i) {
crc ^= data[i];
}
return crc;
}GPIO 使用
前置条件:必须在高级设置中选择接口协议为gpio
接收协议 使用ev3/spike返回数据的命令来设置高低电平, 数值对应如下:
0: 1和2引脚都为低电平。
1: 1引脚为高电平,2引脚为低电平。
2: 1引脚为低电平,2引脚为高电平。
3: 1引脚为高电平,2引脚为高电平。
REQ
app安装问题
IOS版本限制:IOS 16.7版本之前wifi视频功能不支持,16.7版本之后支持
WINDOWS:如果遇到打开一直转圈,可以试试右键管理员运行或者安装到D盘目录; 如果出现闪退,请检查是否有安装微软webview2,检查是否支持蓝牙RGB灯颜色的作用
红色:电池充电中
绿色:电池充满电或者无电池正常状态
黄色:无摄像头扫描不到设备
优先重启APP,如果还不行,拔掉设备电源,让设备重启。
如果是spike设备,观察灯是否是白色,如果是的话,说明电池没有电,需要充电无法显示视频
- 查看PC网络是否和设备网络在同一局域网(设备只支持2.4G)
- 如果上面都是的情况下还是不行,使用AP方式连接,修改完AP热点后,设备断电重启,PC连接设备的热点,点击刷新试试
- 如果上面的还是不行,再排查程序是否有问题,目前程序执行的逻辑是, 每一帧图像都会经过程序处理,程序处理完后发送到PC进行显示。 如果程序处理中出现死循环或sleep很久,那么也会导致图像帧输出不到pc端。 比如下面的代码就会导致程序睡眠很久,从而导致没有图像
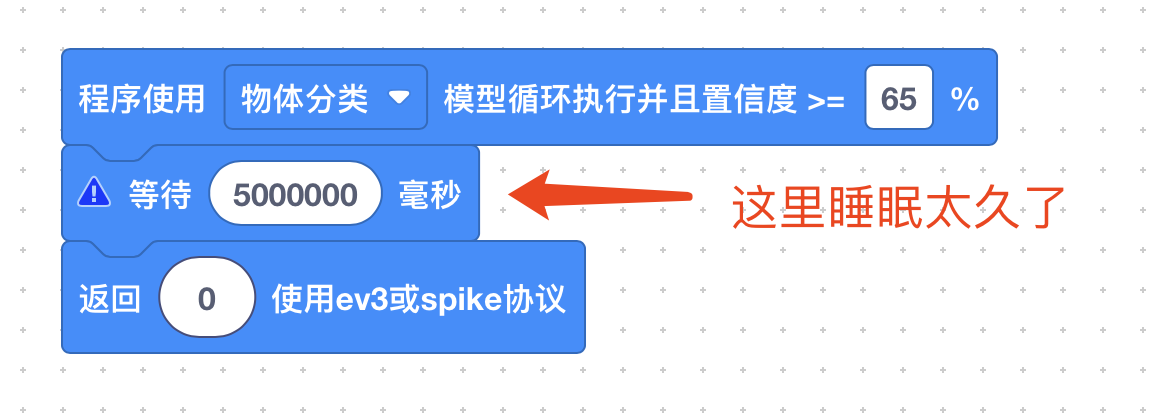
 这种情况下,需要修改代码,下载到设备,等待10S后,设备断电重启。
这种情况下,需要修改代码,下载到设备,等待10S后,设备断电重启。