垃圾分类机器人教案(塑料 & 纸壳)
一、教学目标
- 了解 垃圾分类 的基本概念,重点认识 塑料(Plastic) 与 纸壳(Paper / Cardboard)。
- 理解 AI 视觉识别 在真实生活场景中的应用。
- 学习使用 SPIKE Prime + AI 视觉传感器 进行物体识别。
- 掌握 电机位置校准 与 机械臂控制 的基本方法。
- 将“识别结果 → 逻辑判断 → 机械动作”形成完整系统思维。
二、教学准备
1. 硬件准备
- LEGO SPIKE Prime 主控
- AI 视觉传感器(SPIKE F 口)
- 大型电机 × 2
- 机械臂电机:D 口
- 旋转位置电机:B 口
- 简单机械臂结构(可抓取抬起)
- 垃圾分类收集盒 × 2(塑料 / 纸壳)
- 分类素材 × 4
- 塑料素材 × 2
- 纸壳素材 × 2
⚠️ 使用前 必须对 B 口和 D 口电机进行位置校准
2. 软件准备
- LEGO SPIKE App
- Robot code App
三、教学流程
1. 导入环节(10 分钟)
- 提问:
- 垃圾为什么要分类?
- 塑料和纸壳在外观上有什么不同?
- 引导学生思考:
- 如果让机器人来帮我们分类,需要哪些“能力”?
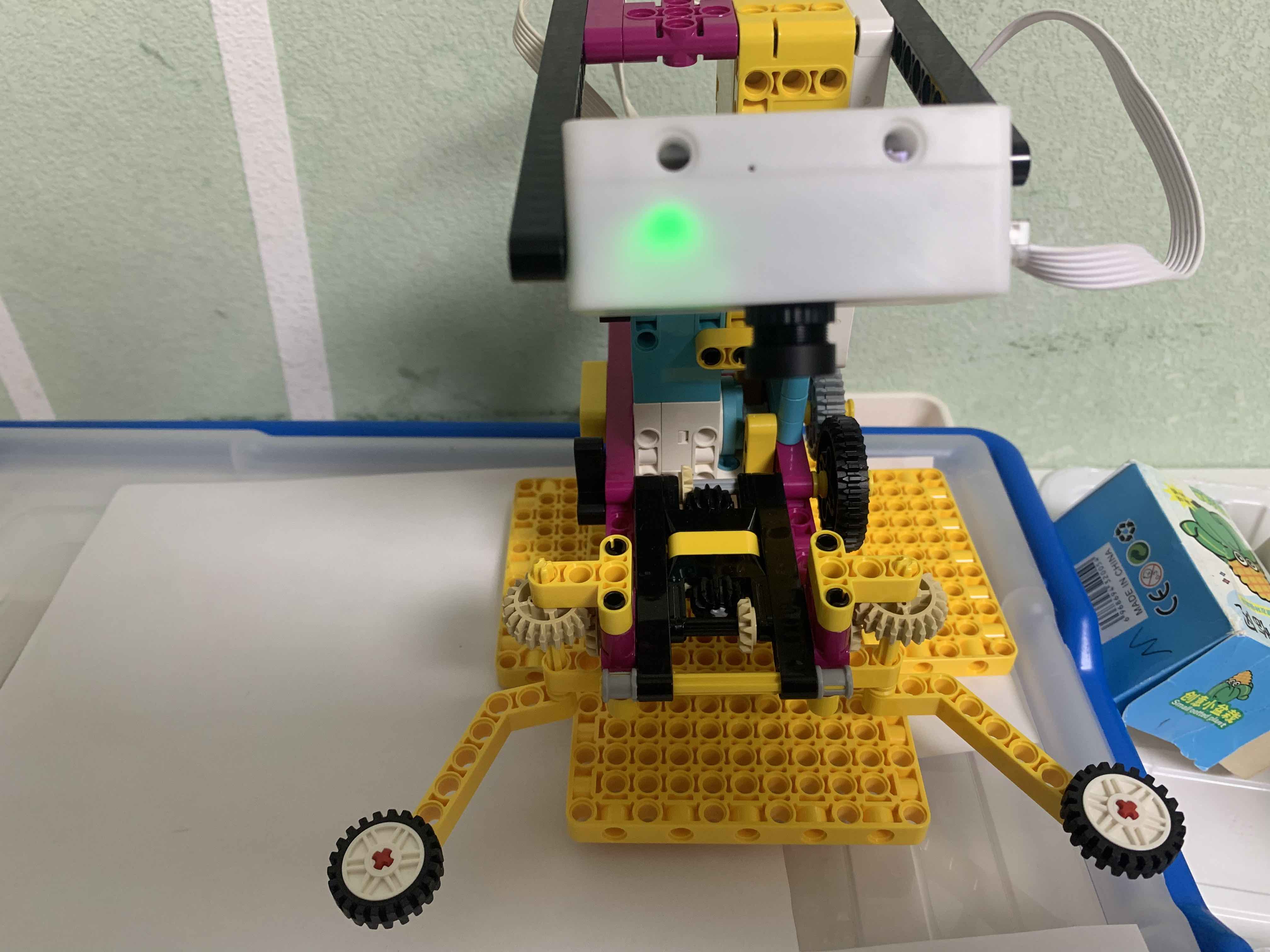
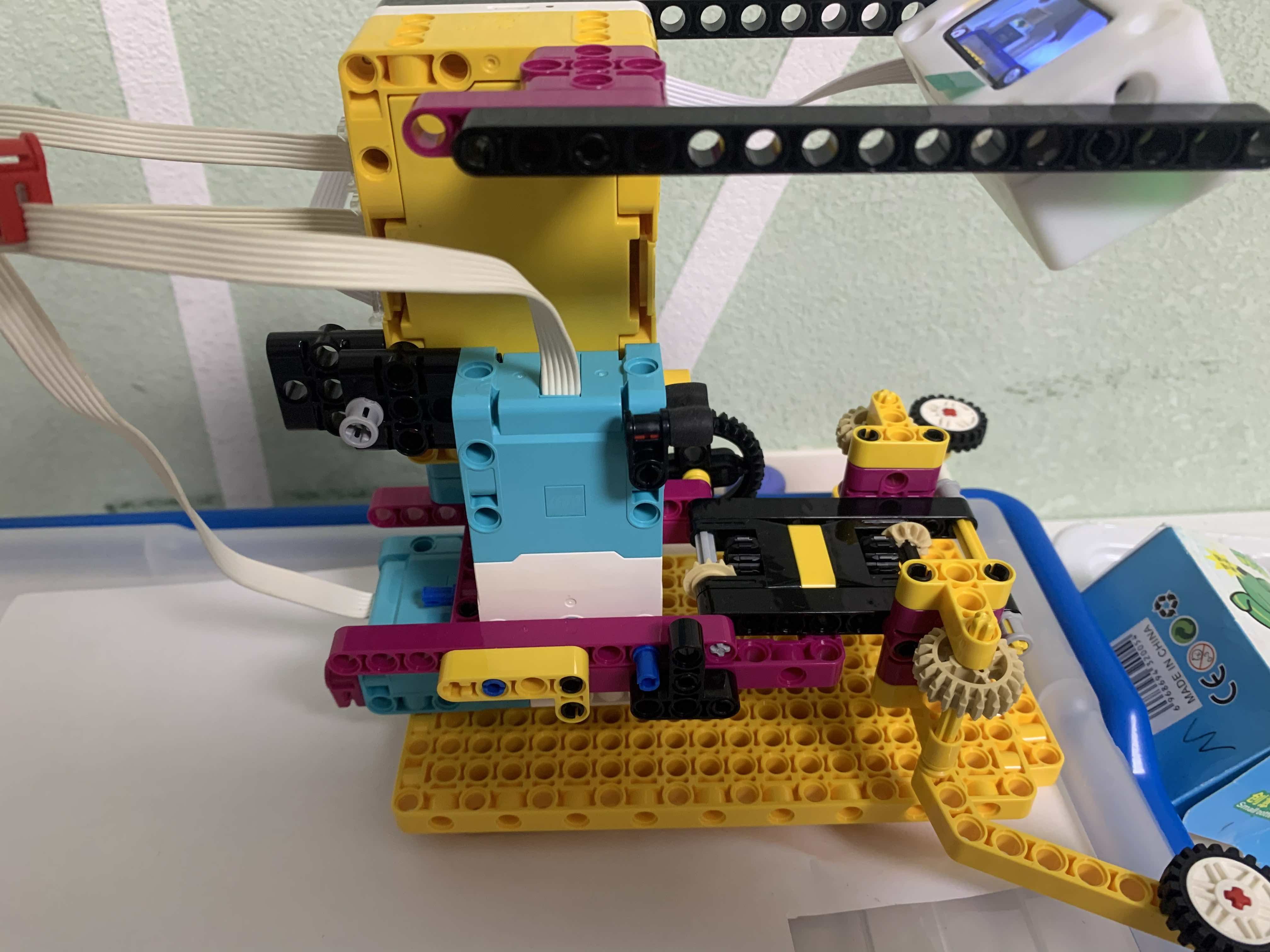
2. 结构搭建(15 分钟)
- 搭建一个可左右旋转的底座(B 口)
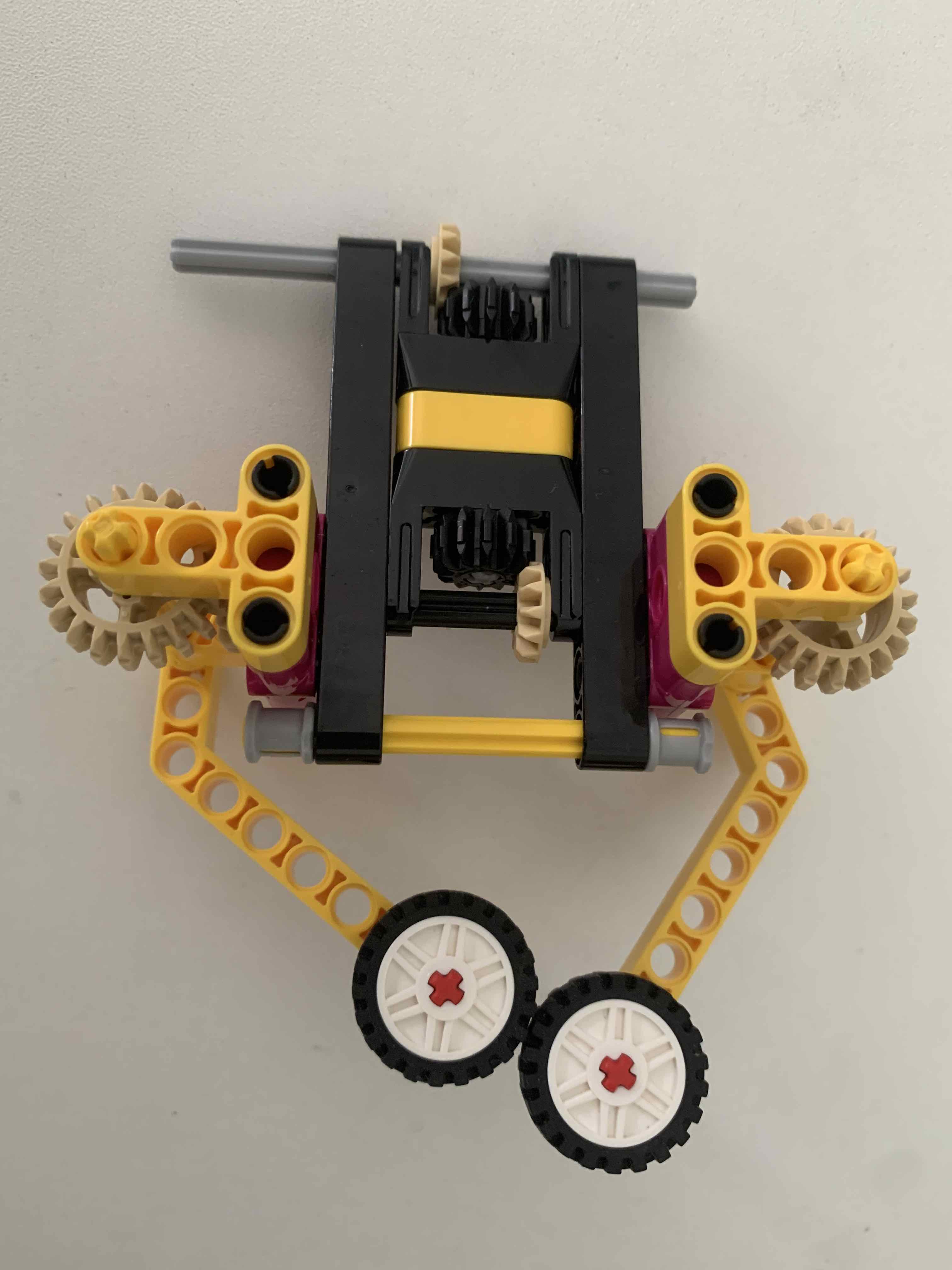
- 搭建一个可抓取/推动垃圾的机械臂(D 口)
- 将 AI 视觉传感器安装在正前方,确保视野无遮挡
- 连接端口:
- 视觉传感器 → F 口
- 机械臂电机 → D 口
- 旋转电机 → B 口



3. 编程环节(25 分钟)
(1)电机位置校准
- 启动程序后:
- 将旋转电机(B 口)转到中立位置(90°),也可以设置其他,程序需要同步修改
- 将机械臂(D 口)回到初始位置(350°),也可以设置其他,程序需要同步修改
- 设置该位置为“基准位”
(2)视觉识别逻辑
- 读取 AI 视觉传感器识别结果
- 判断识别类别:
- 如果是 plas, 返回1
- 如果是 paper, 返回2
- 其他 返回0
(3)分类动作设计
- 识别为 Plastic:
- 执行catch抓取操作
- 执行plas旋转操作
- 执行release释放操作
- 识别为 Paper:
- 执行catch抓取操作
- 执行paper旋转操作
- 执行release释放操作
- 动作完成后:
- 所有电机回到初始位置,等待下一次识别
spike代码示例 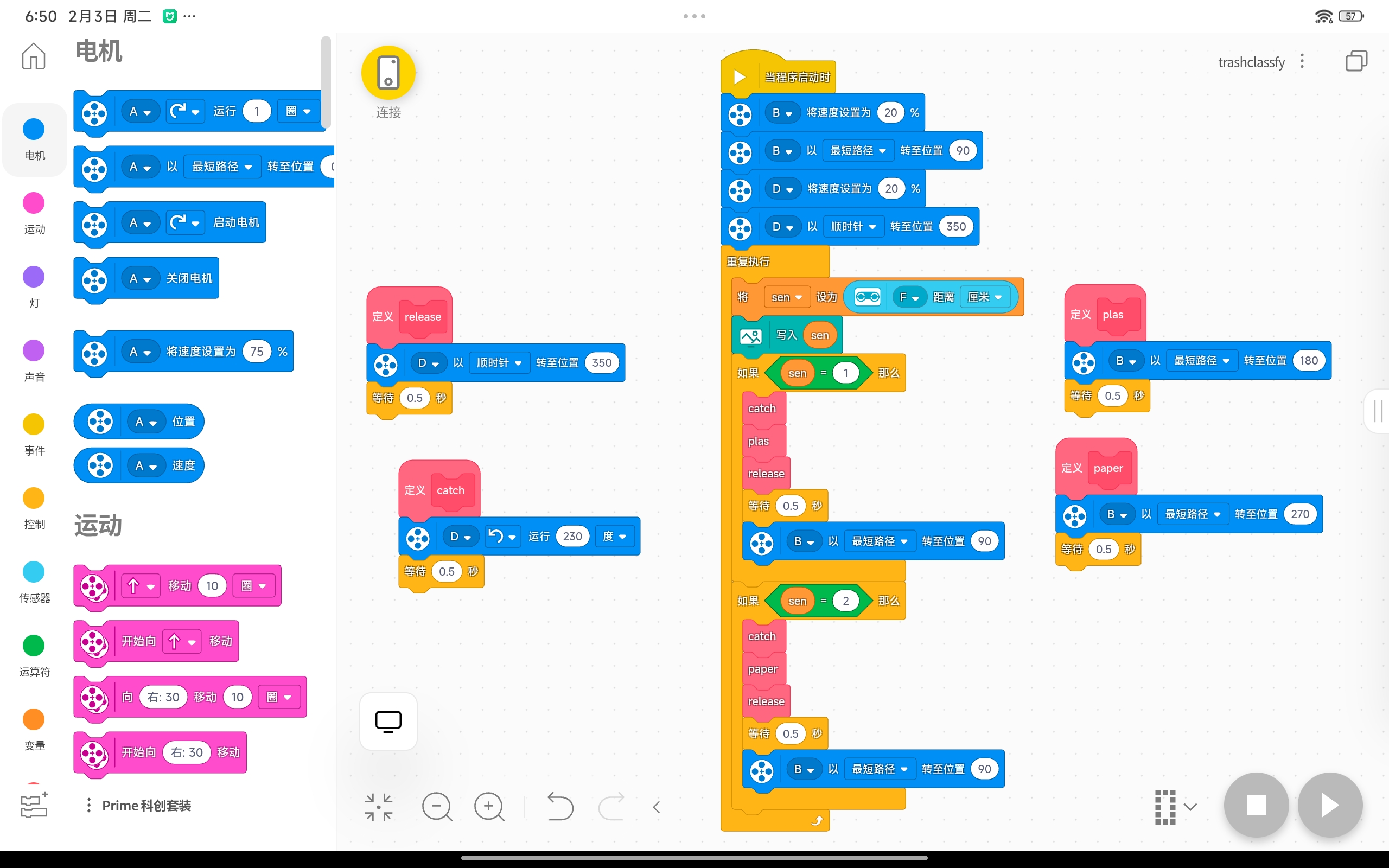 robot code 代码示例 编码前,请先对4个分类的物品进行拍照设置
robot code 代码示例 编码前,请先对4个分类的物品进行拍照设置 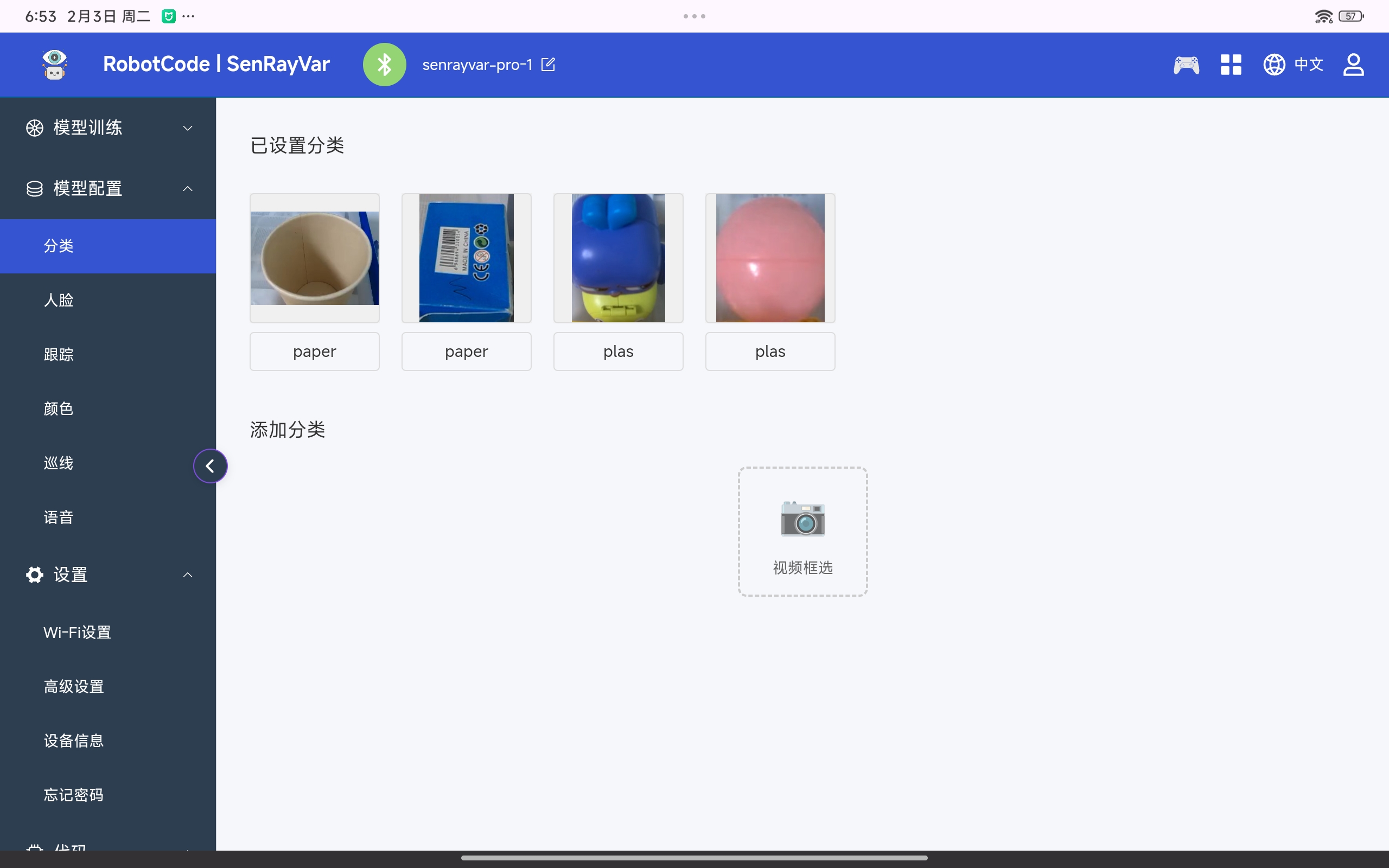 另外 算法识别区域设置为方形,设置完后视频中间会出现一个正方矩形线条,只有这里面的才进行识别,如果还需要其他区域范围,可以给我们发送邮件提供建议。
另外 算法识别区域设置为方形,设置完后视频中间会出现一个正方矩形线条,只有这里面的才进行识别,如果还需要其他区域范围,可以给我们发送邮件提供建议。  代码
代码 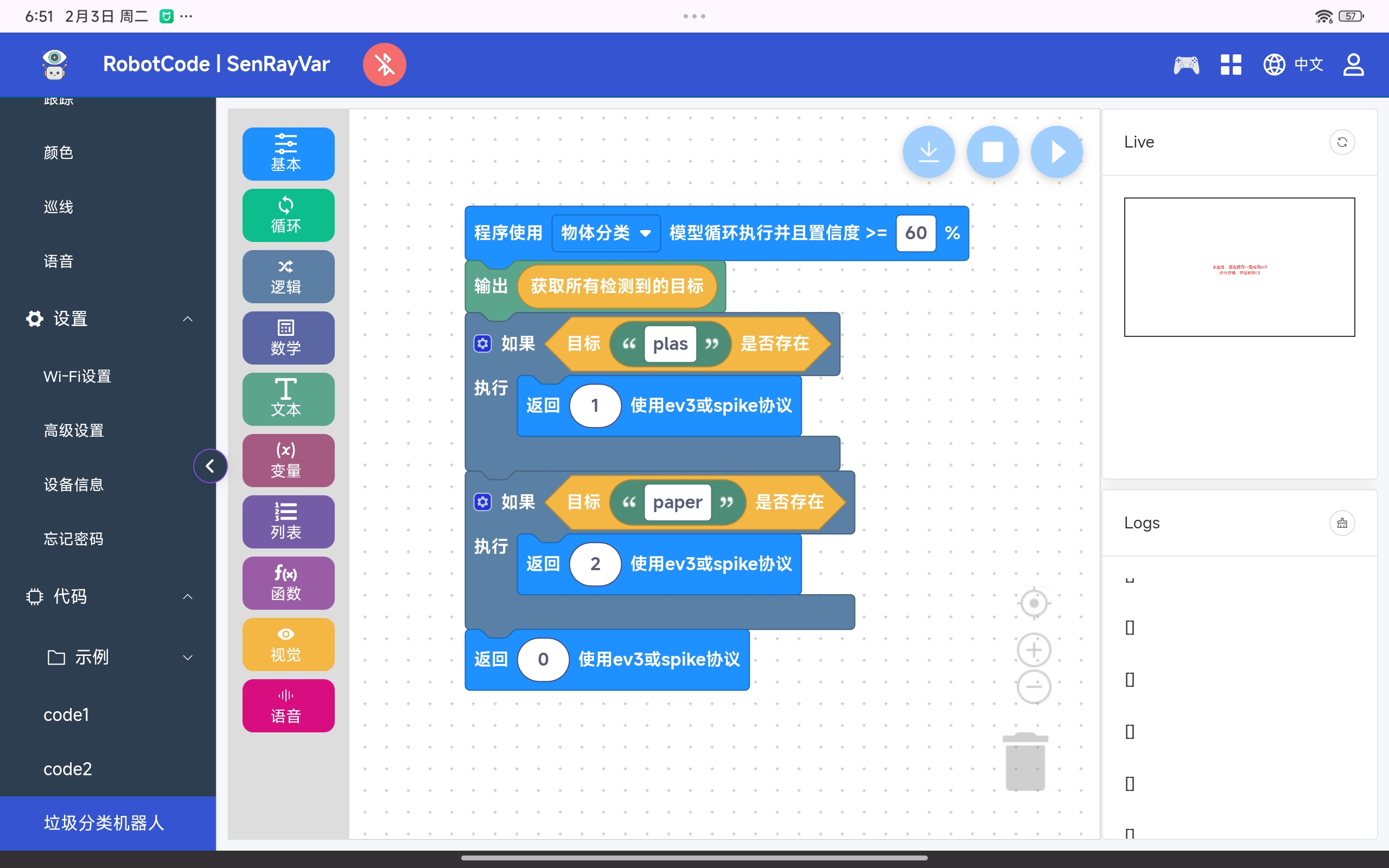 根据情况进行置信度调节
根据情况进行置信度调节
四、演示与测试
- 依次放入 4 个测试素材
- 观察识别结果是否正确
- 检查:
- 机械臂动作是否准确
- 垃圾是否被放入正确分类盒
- 讨论:
- 哪些物体更容易被误判?为什么?
五、拓展思考
- 如果加入 金属 / 厨余垃圾,程序需要如何修改?
- 能否加入 计数功能,统计一天分类了多少垃圾?
- 是否可以增加 失败提示或灯光反馈?
- 如果在比赛(如 WRO)中使用,如何提高稳定性?
六、教学总结
- AI 不只是“看见”,还需要 规则和动作配合
- 垃圾分类是现实世界问题,机器人可以真正参与解决
- 一个完整机器人系统 = 传感器 + 逻辑 + 执行机构
- 电机校准是机器人稳定运行的关键步骤