手势智能垃圾桶
一、中文教案
一、教学目标
通过本课程,学生将能够:
- 理解 手势识别(Gesture Recognition) 的基本原理
- 学会使用 AI 视觉传感器 与 LEGO SPIKE 进行交互
- 掌握 传感器数据 → 条件判断 → 电机控制 的编程逻辑
- 将 AI 技术应用到真实生活场景中(智能垃圾桶)
- 提升动手能力、逻辑思维与课堂展示能力
二、教学准备
1. 硬件准备
- LEGO SPIKE 主控(Prime / Essential)
- AI 视觉传感器 ×1(连接 A 口)
- 电机 ×1(连接 B 口)
- LEGO 结构件(用于搭建垃圾桶和翻盖结构)
2. 软件准备
- LEGO SPIKE App
- AI 视觉传感器 robot code app
- 升级检测模型: 模型训练->模型市场 里面 选择手势石头剪刀布模型进行升级
三、教学流程
(一)导入(5–10 分钟)
- 提问讨论:
- 生活中见过哪些“自动垃圾桶”?
- 如果不接触垃圾桶,能不能用手势来控制?
- 引出本课主题: 使用 AI 识别手势,实现智能垃圾桶开关
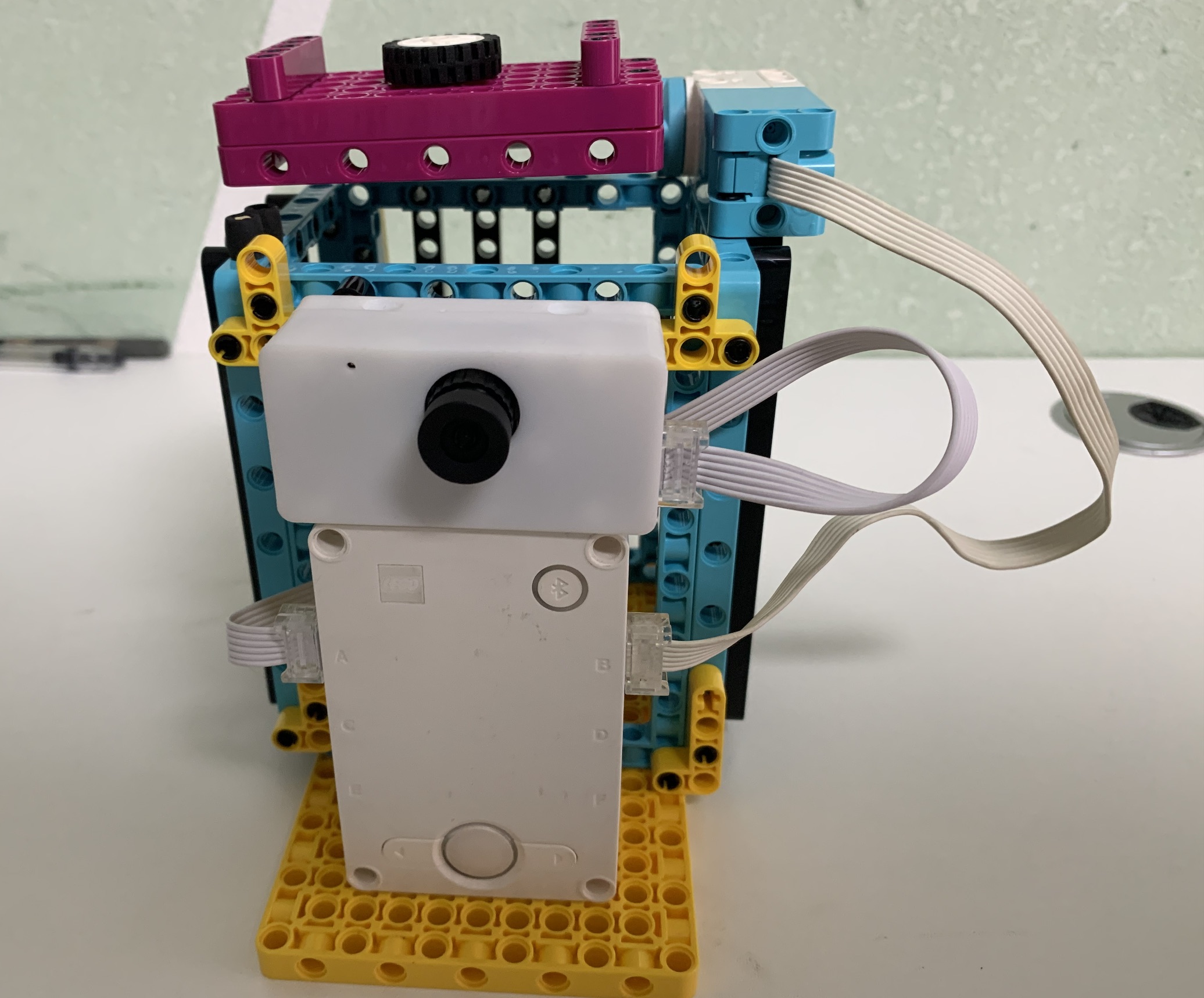
(二)搭建(15 分钟)
- 指导学生搭建:
- 一个可开合的垃圾桶结构
- 使用电机驱动垃圾桶盖
- 确认连接:
- A 口 → AI 视觉传感器
- B 口 → 电机
(三)编程(20 分钟)
1. 手势识别返回值说明
AI 视觉传感器返回数值含义如下:
| 返回值 | 含义 |
|---|---|
| 2 | 打开垃圾桶 |
| 1 | 关闭垃圾桶 |
| 0 | 不执行任何动作 |
2. 编程逻辑说明
- 持续读取 A 口视觉传感器的数值
- 使用条件判断控制电机:
循环执行: 如果传感器值 = 2 → 电机正转(打开) 如果传感器值 = 1 → 电机反转(关闭) 如果传感器值 = 0 → 不执行动作
spike code: 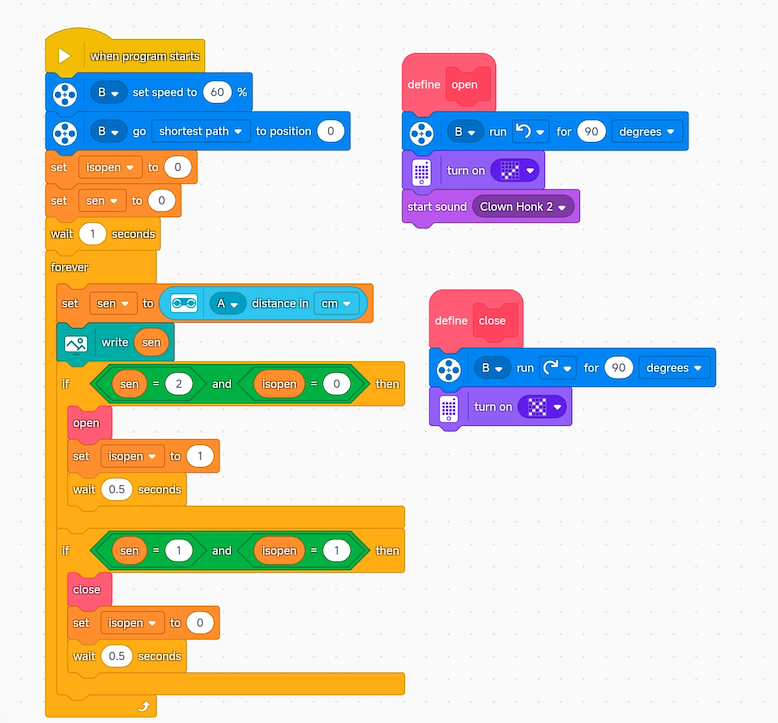
ai vision code: 注意:必须升级检测模型 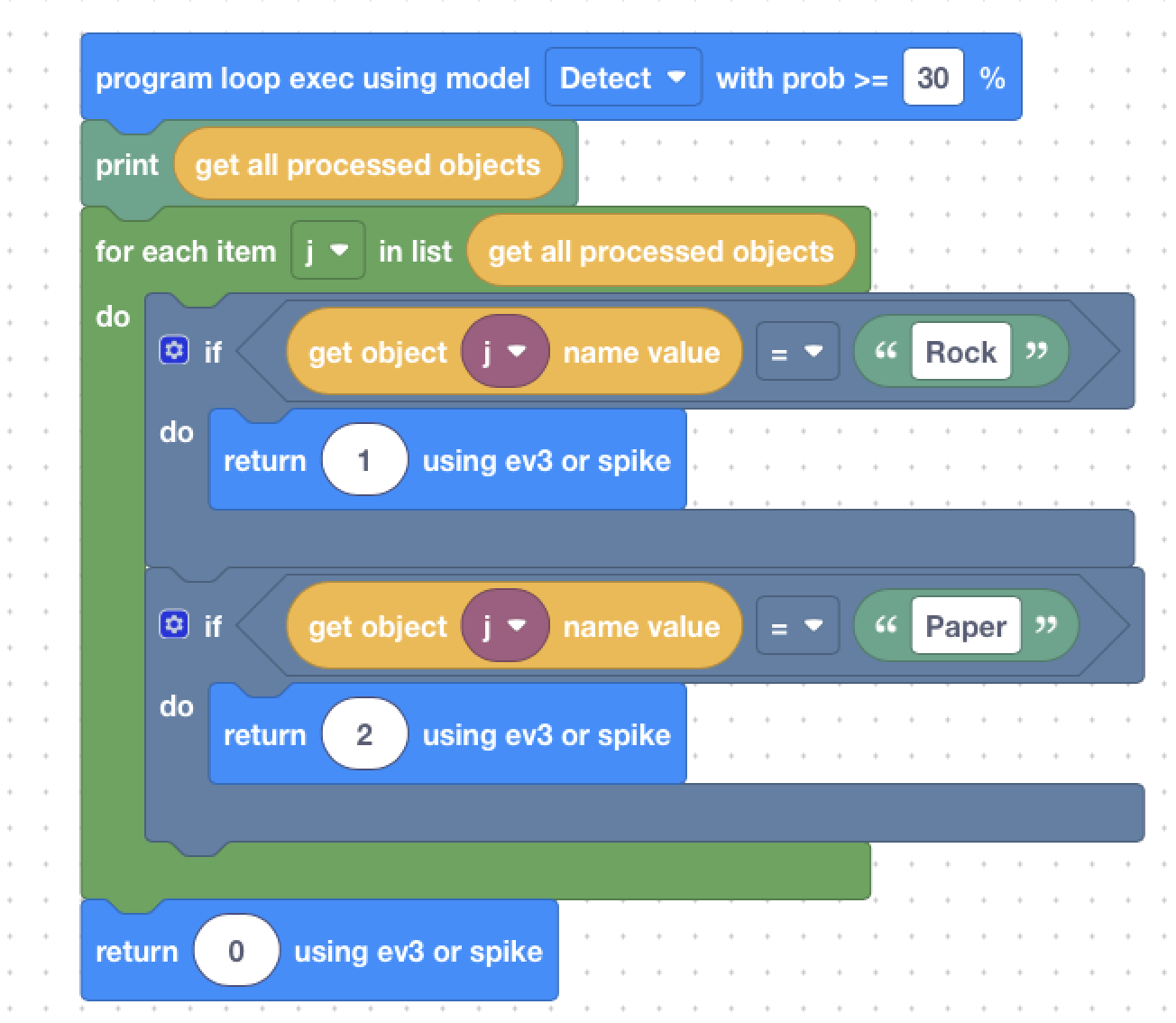
四、演示与测试
- 学生使用不同手势进行测试
- 检查:
- 手势是否能被正确识别
- 电机转向是否正确
- 是否存在误触发情况
- 引导学生进行调试与优化
五、拓展思考
- 如果识别不稳定,可能是什么原因?
- 能否增加:
- 自动延时关闭功能?
- 按钮或语音作为备用控制?
- 打开次数统计功能?
- 生活中还有哪些设备可以用手势控制?
六、教学总结
- 本课程完成了一个完整的 AI 感知 → 决策 → 行动 系统
- 学生理解了 AI 在智能设备中的实际应用
- 强调:AI 不只是“识别”,而是“理解并执行动作”