APP 无线远程遥控小车
一、教学目标
通过本课程,学生将能够:
- 理解 无线遥控(Wireless Control) 的基本概念
- 学会使用 AI 视觉传感器作为无线控制接口
- 掌握 传感器数值 → 小车运动控制 的映射关系
- 体验“手机 App → 机器人动作”的完整控制链路
- 理解 AI 设备不仅能“看”,也能作为 智能交互终端
二、教学准备
1. 硬件准备
- LEGO SPIKE 主控
- AI 视觉传感器 ×1(连接 A 口)
- 电机 ×2(左右轮,参考 LEGO 官方小车搭建)
2. 软件准备
- LEGO SPIKE App
- AI 视觉传感器配套 手机 App
- 手册文档(用于查询 1–40 数值含义)
三、教学流程
(一)导入(5–10 分钟)
- 讨论问题:
- 我们平时是如何遥控玩具车的?
- 如果不用遥控器,用手机 App 可以吗?
- 引出主题: 使用 AI 视觉传感器,实现手机无线遥控 LEGO 小车
(二)搭建(15 分钟)
- 按 LEGO 官方教程搭建基础小车:
- 左右轮分别由电机驱动
- 确认连接:
- A 口 → AI 视觉传感器
- 电机端口按官方示例连接
- 确保小车结构稳定、轮子可自由转动
 OR
OR 
(三)编程(20 分钟)
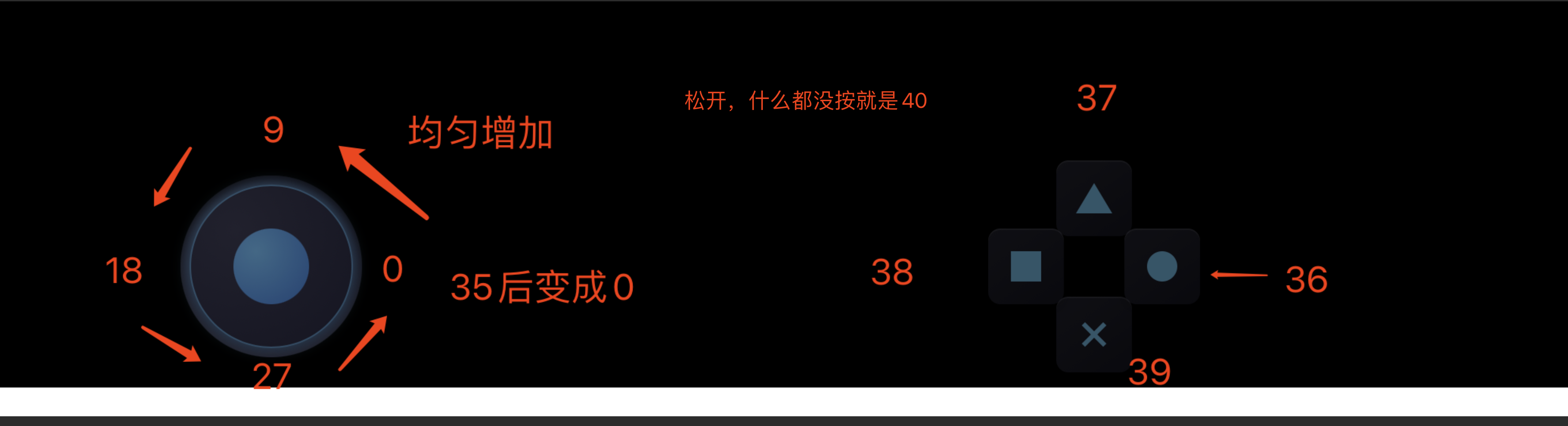
1. 传感器数值说明
- AI 视觉传感器通过无线 App 返回 1–40 的控制数值
- 每个数值对应一个控制指令(参考官方手册)
示例(仅用于教学说明):
| 数值范围 | 含义示例 |
|---|---|
| 9 | 前进 |
| 27 | 后退 |
| 9–18 | 左转 |
| 0–9 | 右转 |
实际数值定义以传感器手册为准
2. 编程逻辑说明
- 持续读取 A 口传感器数值
- 使用条件判断控制左右电机转速与方向
示例逻辑:
循环执行: 读取传感器数值 根据数值范围判断动作 控制左右电机运动
spike code: 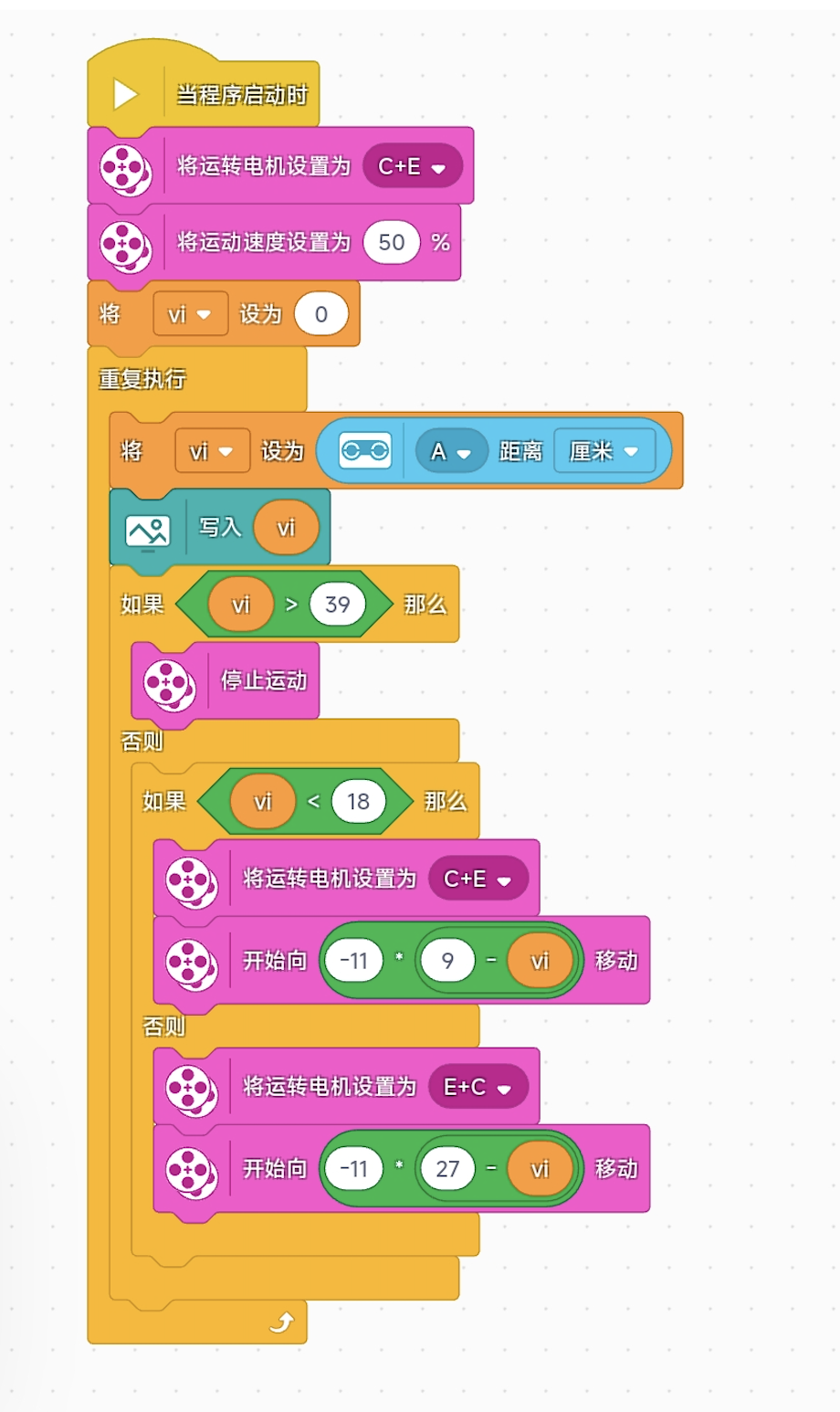 ai vision code:
ai vision code: 
四、演示与测试
- 学生使用手机 App 进行无线遥控
- 测试内容:
- 小车是否能实时响应
- 控制是否流畅
- 是否存在延迟或误操作
- 鼓励学生尝试不同控制模式
五、拓展思考
- 如果加入摄像头画面,是否可以“第一视角驾驶”?
- 如何限制速度,让小车更安全?
- 能否设计:
- 自动避障 + 手动接管?
- 多种驾驶模式(新手 / 专业)?
- 真实世界中,哪些设备使用类似的控制方式?
六、教学总结
- 本课程展示了 无线控制 + 机器人运动 的完整流程
- 学生理解了:
- 传感器不仅能采集信息
- 也能作为 人机交互接口
- 强调: AI 是连接人和机器的重要桥梁
七、课堂展示
- 学生展示遥控小车
- 讲解:
- 数值与动作的映射逻辑
- 程序设计思路
- 可组织“遥控挑战赛”或路线竞速