版本描述
- robot code app 1.0.0版本
- AIVISON Lite 1.0.0版本
- SPIKE 1.6.62版本(当前最新)
物体检测
首先调节焦距到最佳位置,不需要进行配置,模型选择物体检测, 直接识别80种类别的物体,可以调节置信度。
物体分类 (高级)
- 调节焦距到最佳位置,然后配置分类目标,点击左侧菜单模型配置->分类,采用视频框选进行配置

配置如下 
2. 点击左侧菜单代码->code1,进行编码
⚠️ 注意
当输出坐标X1, Y1 都是 0,0的时候,说明识别不了位置,但仍然可以分类,项目中如果需要使用坐标请排除掉坐标是0的情况。
另外:配置的分类越多,性能越低
文字数字检测
首先调节焦距到最佳位置,不需要进行配置,模型选择文字数字检测,直接可识别印刷中文和英文,可以调节置信度。
人脸检测
- 调节焦距到最佳位置,然后配置人脸,点击左侧菜单模型配置->人脸,采用视频框选进行配置,具体操作参考物体分类。配置如下
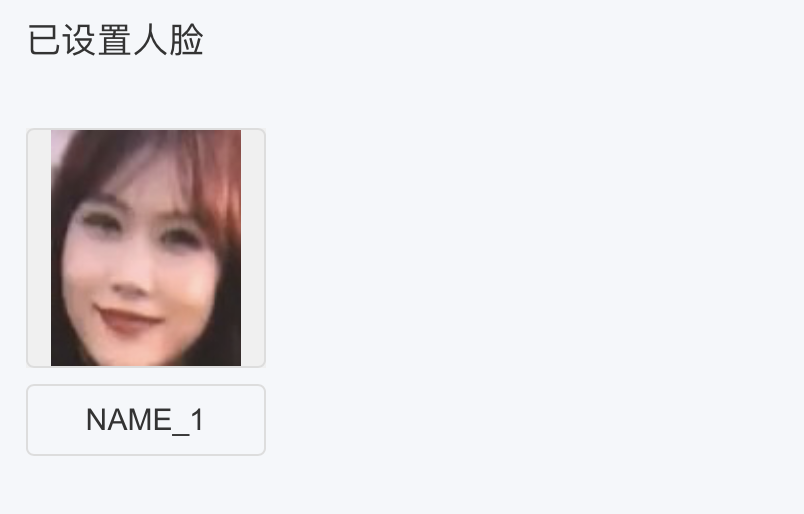
- 点击左侧菜单代码->code1,进行编码视频中检测到4张人脸,但由于只配置了一个,名字是"NAME_1"(可在配置里修改),所以真正匹配到配置的人脸只有一个,也就是右上角的有标记NAME_1的那个。
目标跟踪
- 调节焦距到最佳位置,然后配置跟踪目标,点击左侧菜单模型配置->跟踪,采用视频框选进行配置,具体操作参考物体分类。配置如下

- 点击左侧菜单代码->code1,进行编码
⚠️ 注意
- 目标跟踪只能跟踪一种目标,但是上传时可以上传最多5张照片,可以来自同一目标的不同方位,名称都保持一致
- 如果目标从画面丢失,目标重新回到画面后,如果置信度太低,容易导致目标识别错误,可以保持在65-80%之间调整
人体姿态
首先调节焦距到最佳位置,不需要进行配置,模型选择人体姿态,可以调节置信度。
二维或条形码
首先调节焦距到最佳位置,不需要进行配置,模型选择二维码或条形码,可以调节置信度。
目前支持如下码规格识别
| 线性码 | 工业码 | 二维码 |
|---|---|---|
| UPC-A | Code 39 | QR Code |
| UPC-E | Code 93 | Micro QR Code |
| EAN-8 | Code 128 | Aztec |
| EAN-13 | Codabar | DataMatrix |
| DataBar | DataBar Exanded | PDF417 |
| ITF | MaxiCode (部分) |
⚠️ 注意
务必调节好焦距,要清晰,画面中可以一次识别并返回多个码
颜色检测
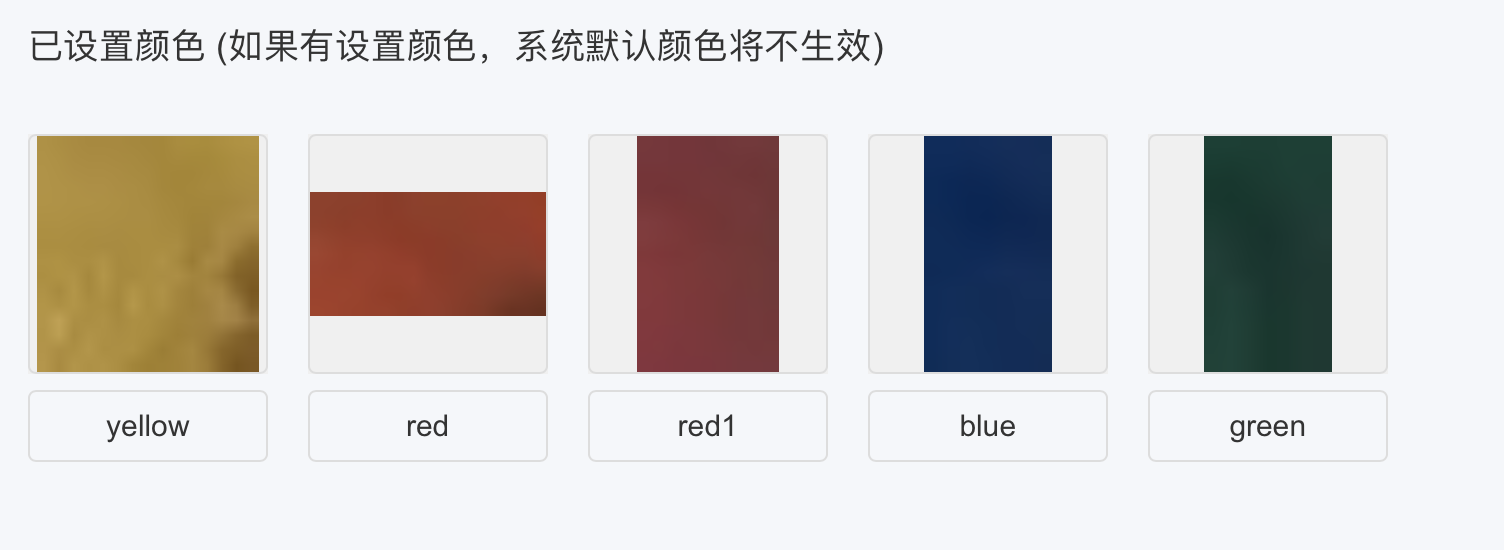
- 调节焦距到最佳位置, 虽然内置有默认颜色匹配, 但是由于光照等环境因素,建议配置自己的颜色,点击左侧菜单模型配置->颜色,采用视频框选进行配置,具体操作参考物体分类。配置如下
- 点击左侧菜单代码->code1,进行编码
⚠️ 注意
- 框选时,与框选目标不同,框选颜色不要框选颜色以外的区域,只框选指定的颜色就可以
- 模型置信度参数调节,参数范围:1 ~ 100。
对应关系:
值越小 → 最小计算区域块面积占整个图像区域比例低(最小约 0.05%)
值越大 → 最小计算区域块面积占整个图像区域比例高(最高约 5%)
功能说明:
小于最小计算区域的块将被忽略,不参与计算
通过调节参数,可以控制模型对小区域噪声的敏感度
巡线
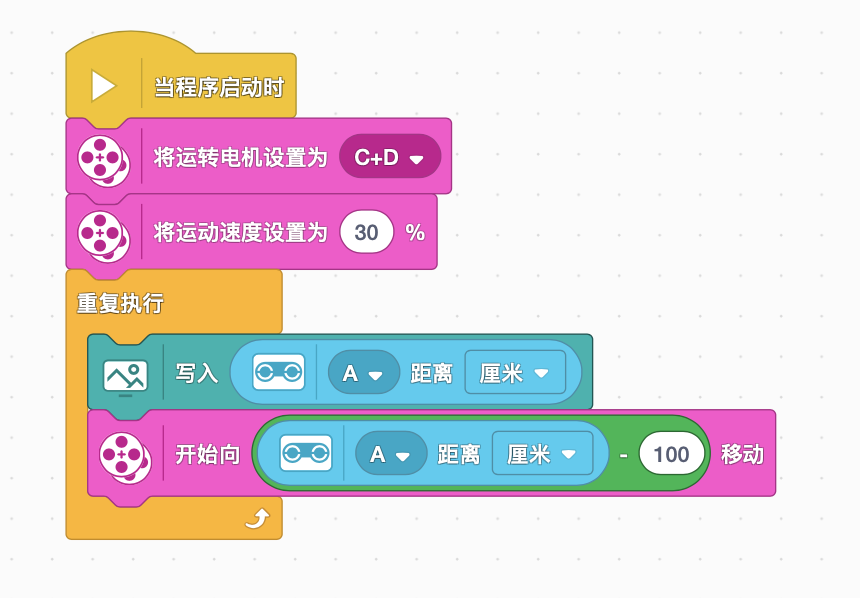
- 调节焦距到最佳位置,选择巡线模型,运行后,此时视频画面最下方会有检测黑线的区域,只有此区域内才进行黑线检测,并以白色显示处理结果。
- SPIKE 程序图如下
⚠️ 注意
- 模型置信度参数调节,参数范围:1 ~ 100。
对应关系:
值越小 → 最小计算区域块面积占巡线区域比例低(最小约 0.1%)
值越大 → 最小计算区域块面积占巡线区域比例高(最高约 10%)
功能说明:
小于最小计算区域的块将被忽略,不参与计算
通过调节参数,可以控制模型对小区域噪声的敏感度 - 模型可以识别出 直线,路口,没线,返回的目标名称分别对应 "LINE", "CROSS", "NONE"。 返回的像素偏移在坐标X1里面,负数代表位于黑线中心线的左侧,正数代表位于黑线中心线的右侧,绝对值越大,说明偏离黑线中心线越远。
- 当目标显示为LINE时,返回线条在中心位置的偏移,通过获取X1值获取;当目标显示为CROSS时,会返回检测到的图像的角的数量(例如矩形是4,5边形是5),通过获取X2值获取,这样就可以根据实际情况来判断是丁字路口还是十字路口了
- 模型置信度参数调节,参数范围:1 ~ 100。